После гоночных рам, давно уже хотел собрать раму для фристайла. Отличает их то, что центр масс у них лежит точно в центре, а камеры курсовые лежат очень низко. Типичным представителем является классическая рама ImpulseRC Alien 5 Но в последний год ее потеснили Chameleon и XHover Stingy. А буквально в конце года появилась рама отечественной разработки Revolver.




Мне больше приглянулась рама Stingy и как раз в Китае появился ее клон PUDA. Конечно разница в цене и один из первых отзывов на нее сделали свое дело. Часть компонентов у меня была, но некоторые детали заказал.
Рама PUDA

Пришла в такой упаковке

Моторы AOKFLY RV2306 2306 2650KV

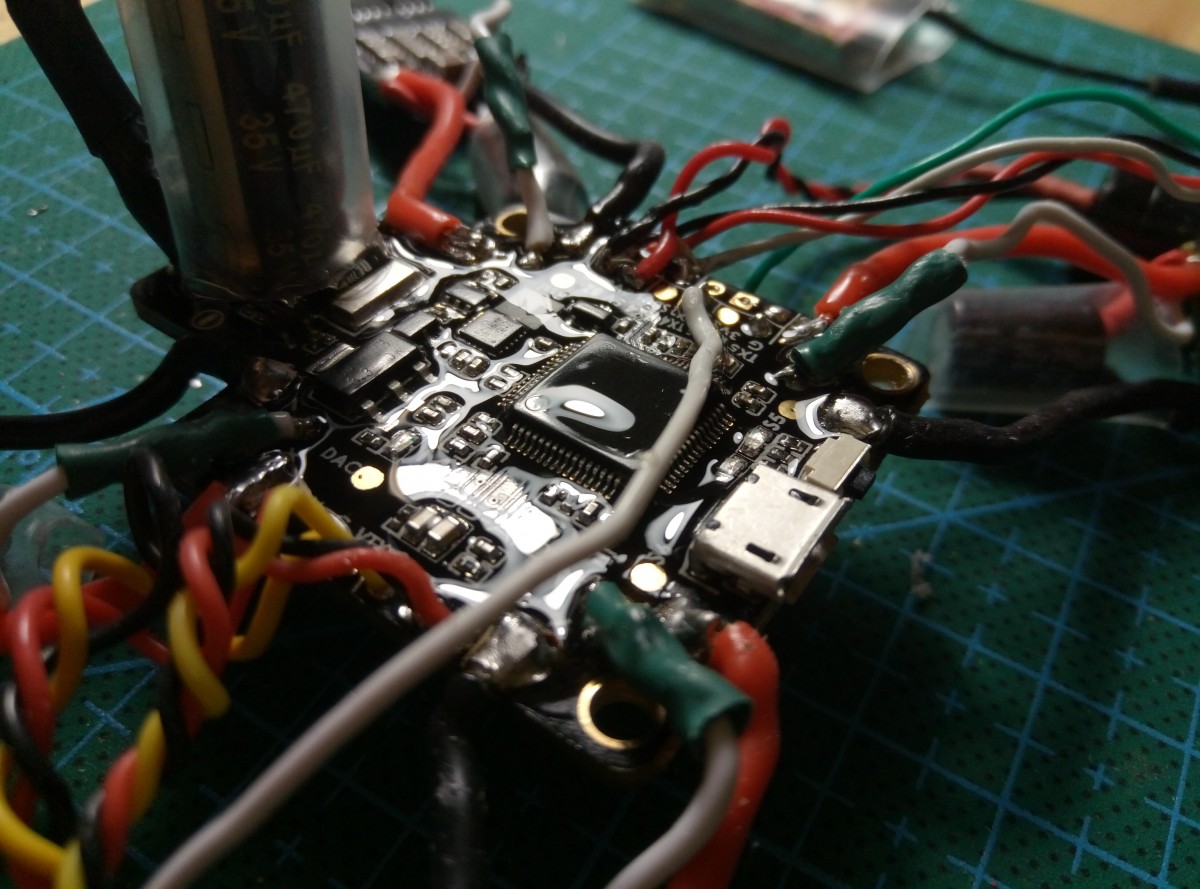
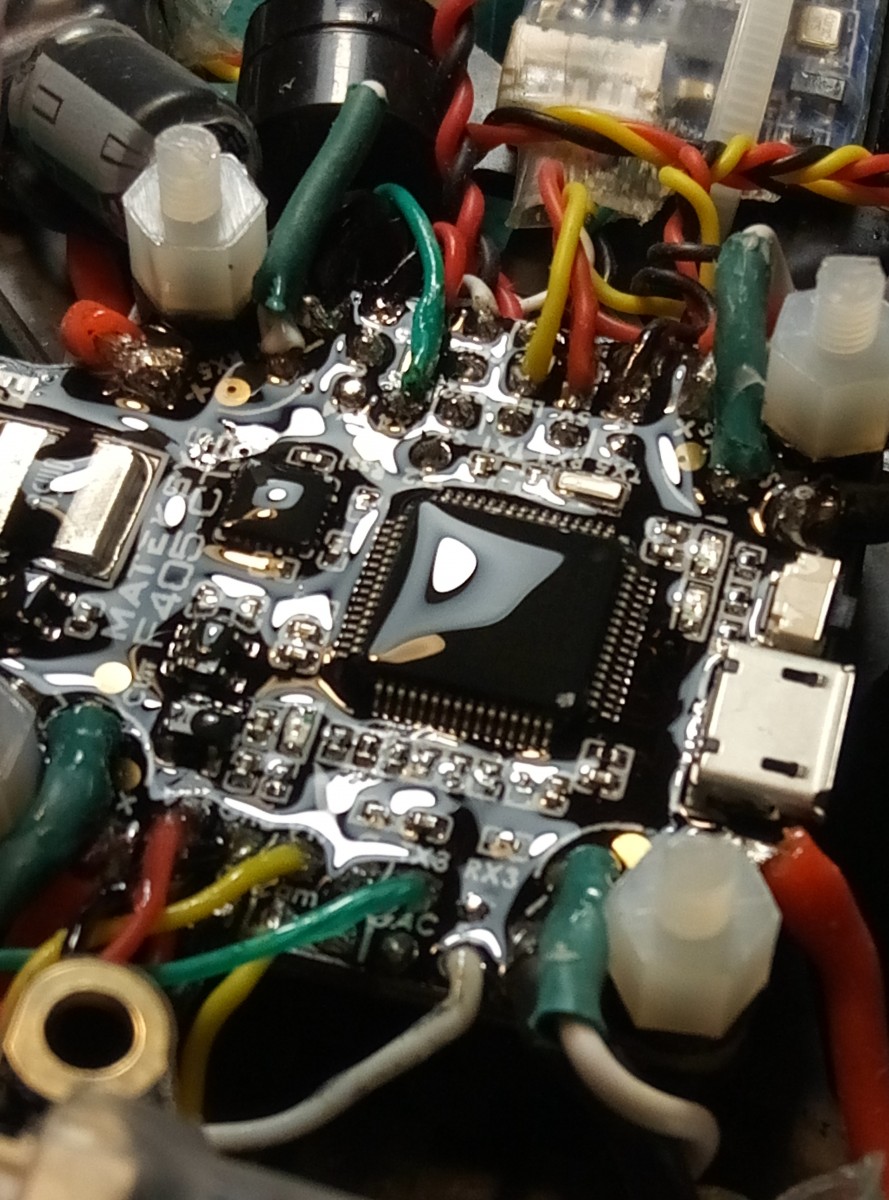
Полетный контроллер Matek Systems BetaFlight F405-AIO

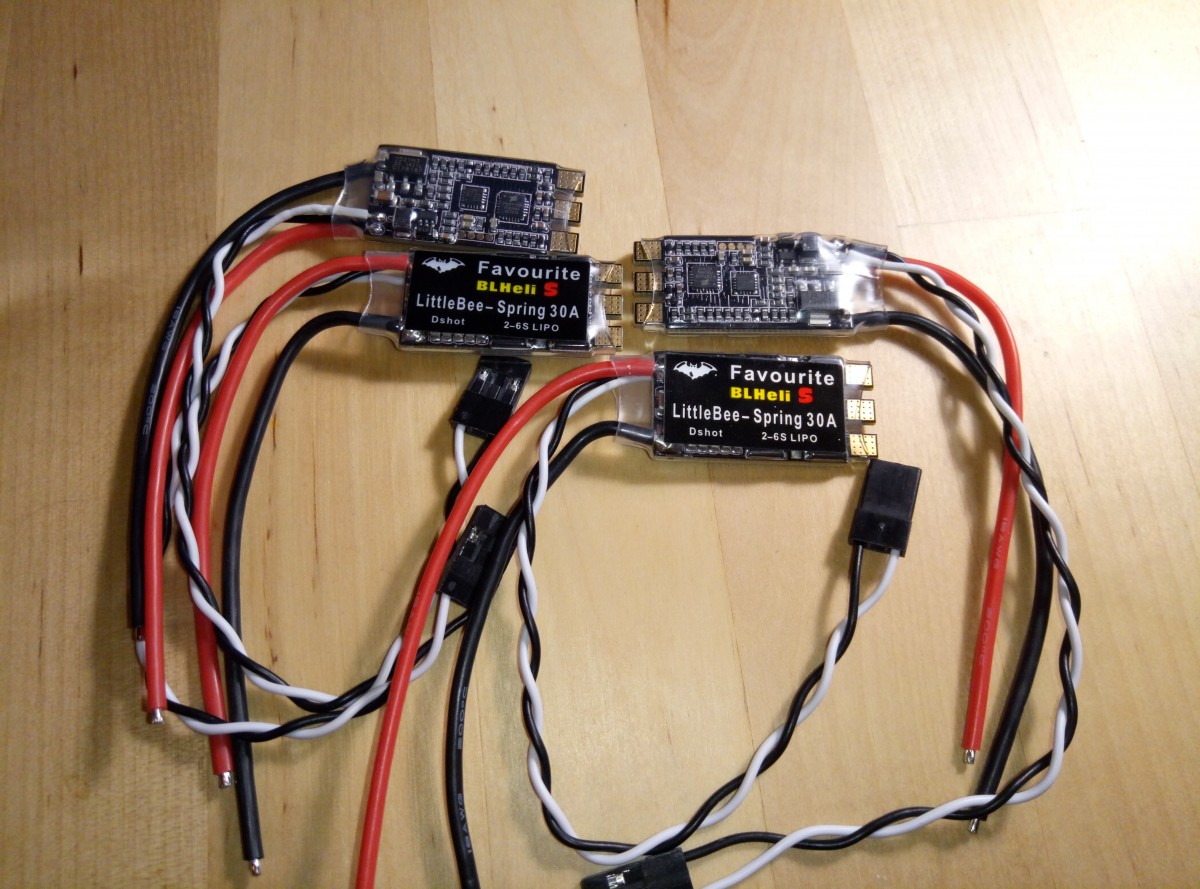
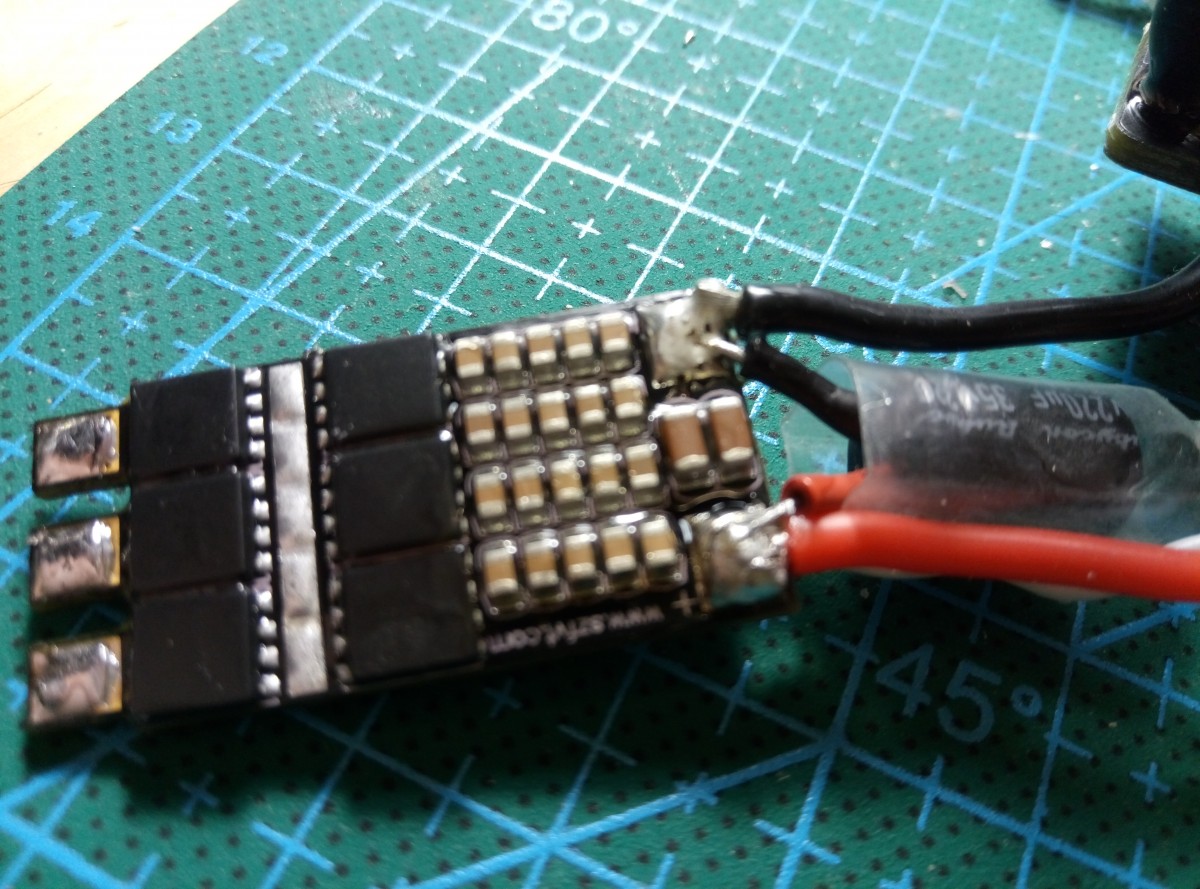
Регуляторы 4X Favourite FVT LittleBee Spring 30A ESC BLHeli_S
приемник FrSky XSR
Курсовая камера Runcam OWL+
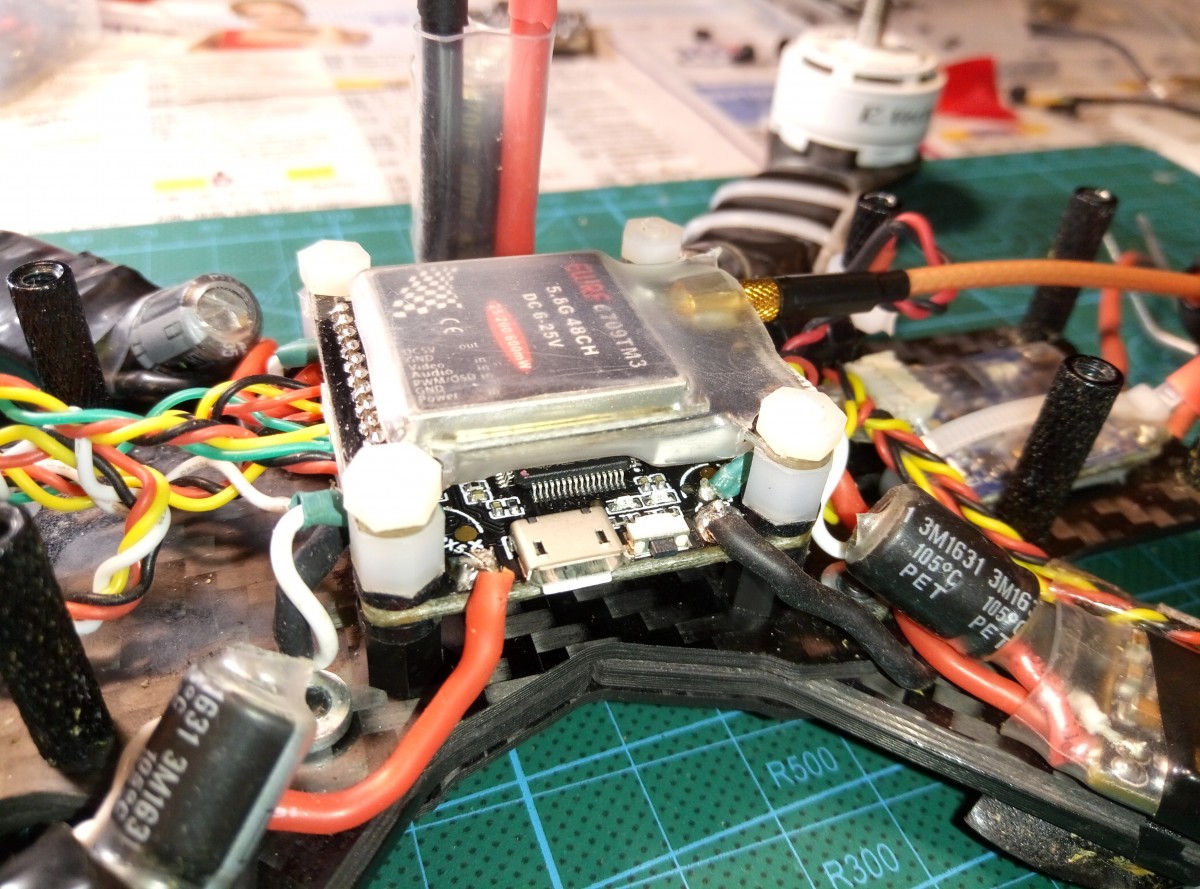
Видео передатчик Tramp HV
Сборка.
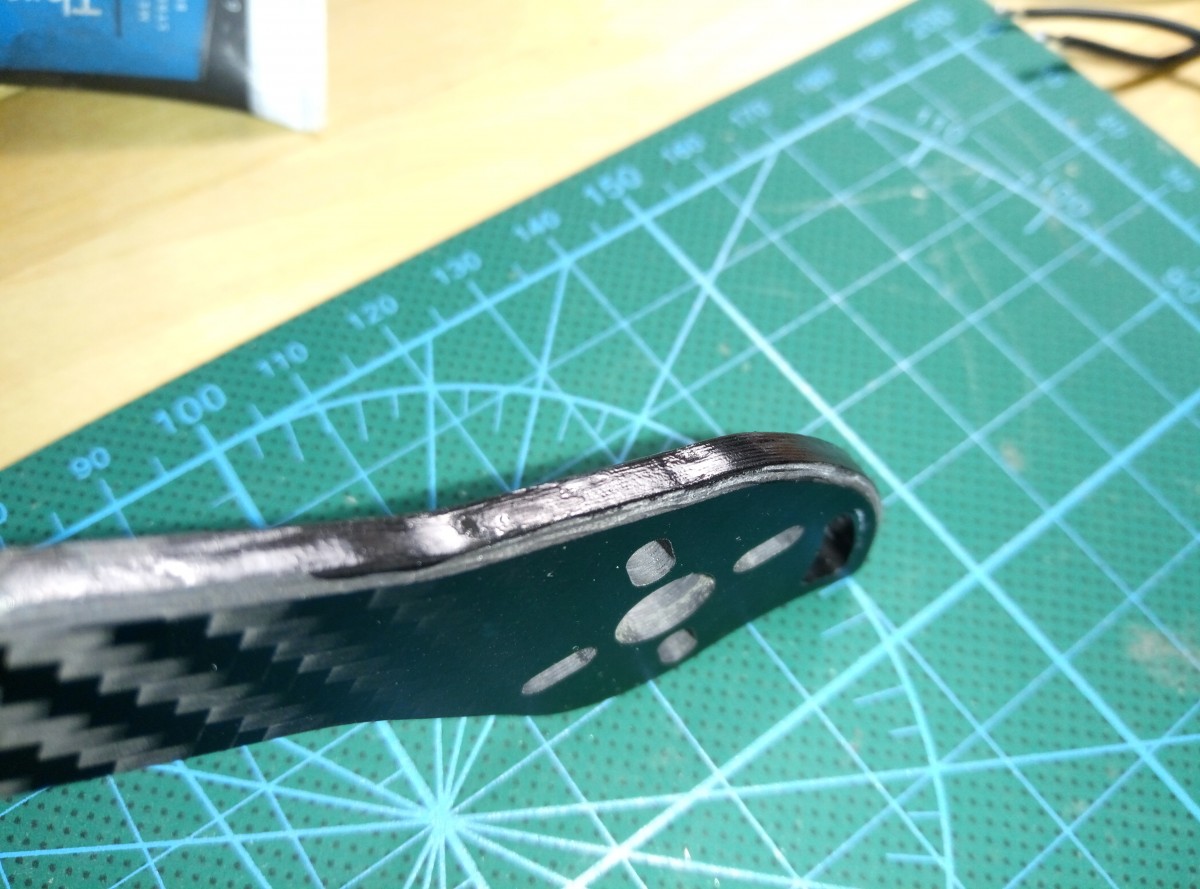
Края на лучах уже обработаны изготовителем.

Укрепляем концы Цианокрилатом
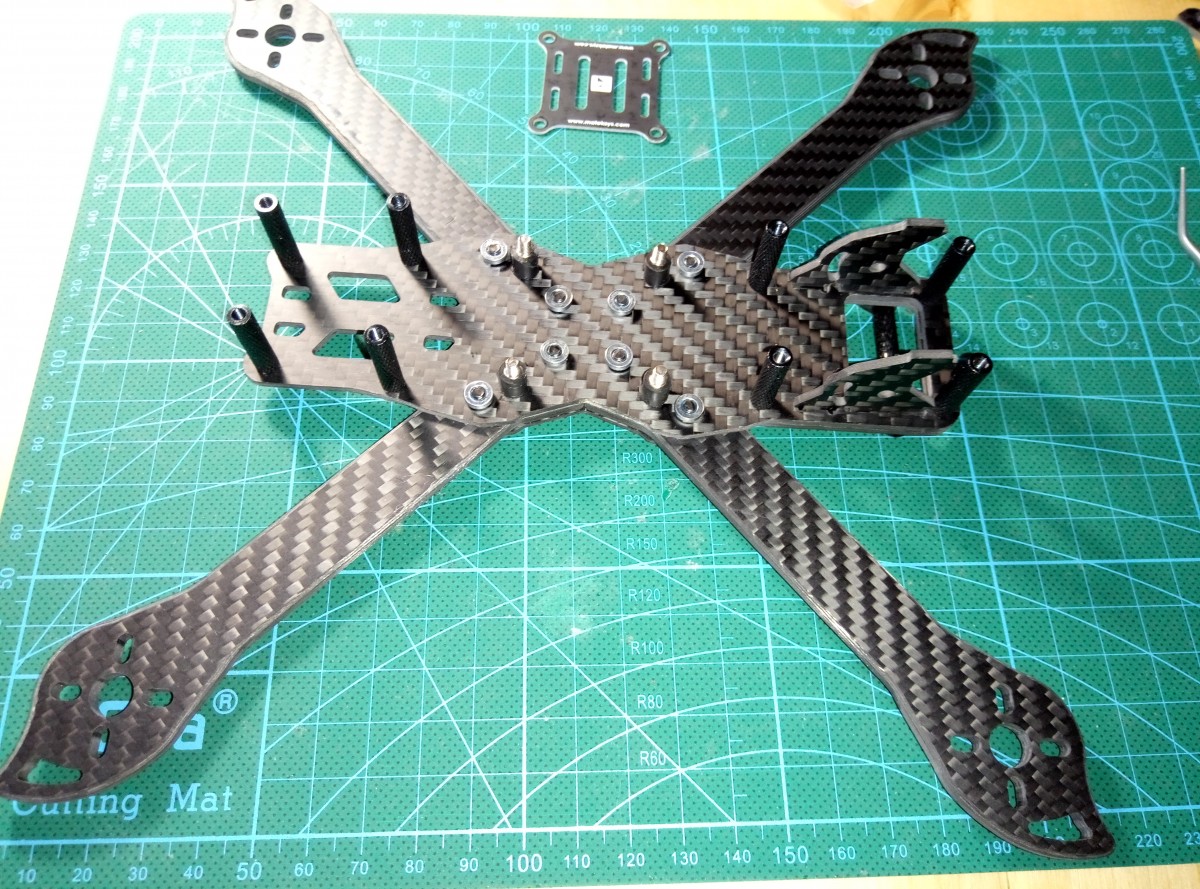
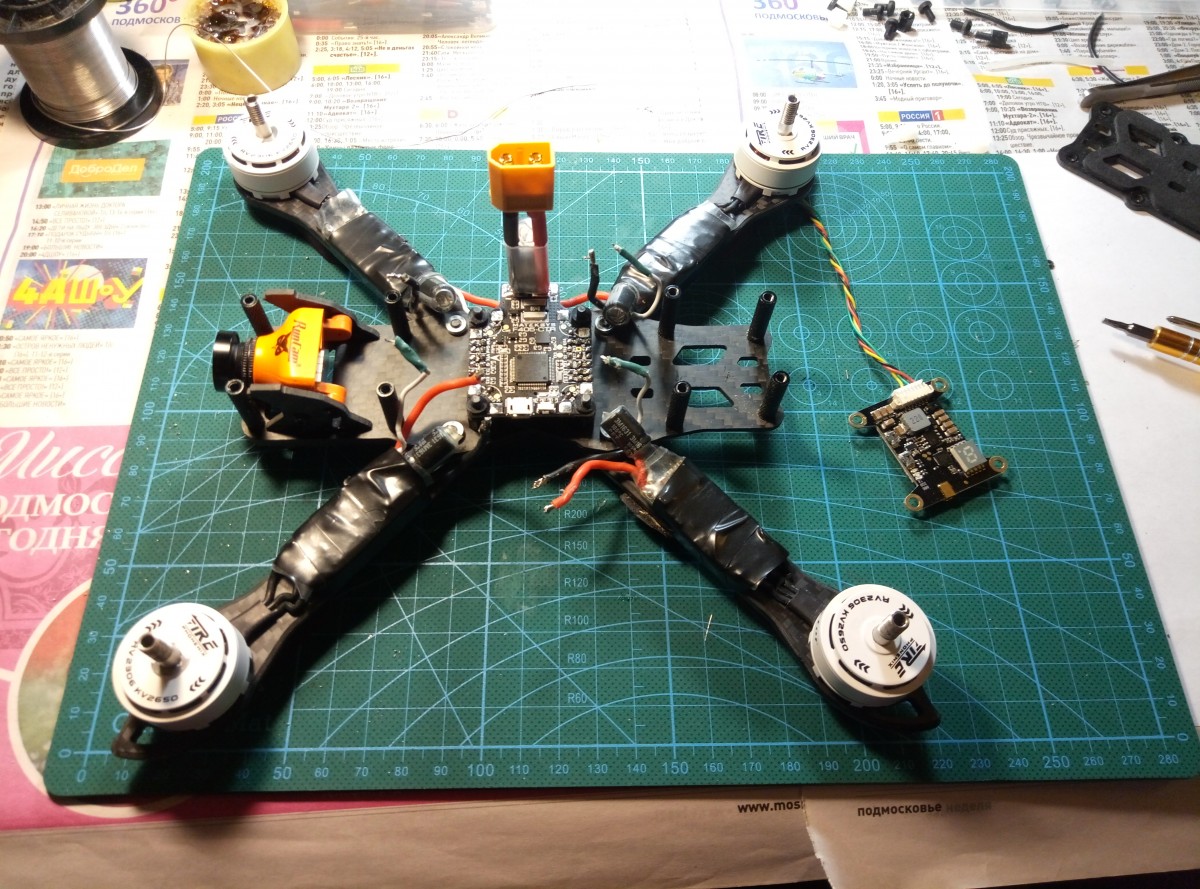
Крепление лучей и главной платы


Примерка габаритов для размещения компонентов. Место много, но на 2-м этаже приемник или передатчик не помещаются

Установка моторов. Провода очень длинные и было бы удобно использовать 4-1 ESC. Но я все таки решил использовать раздельные регуляторы.


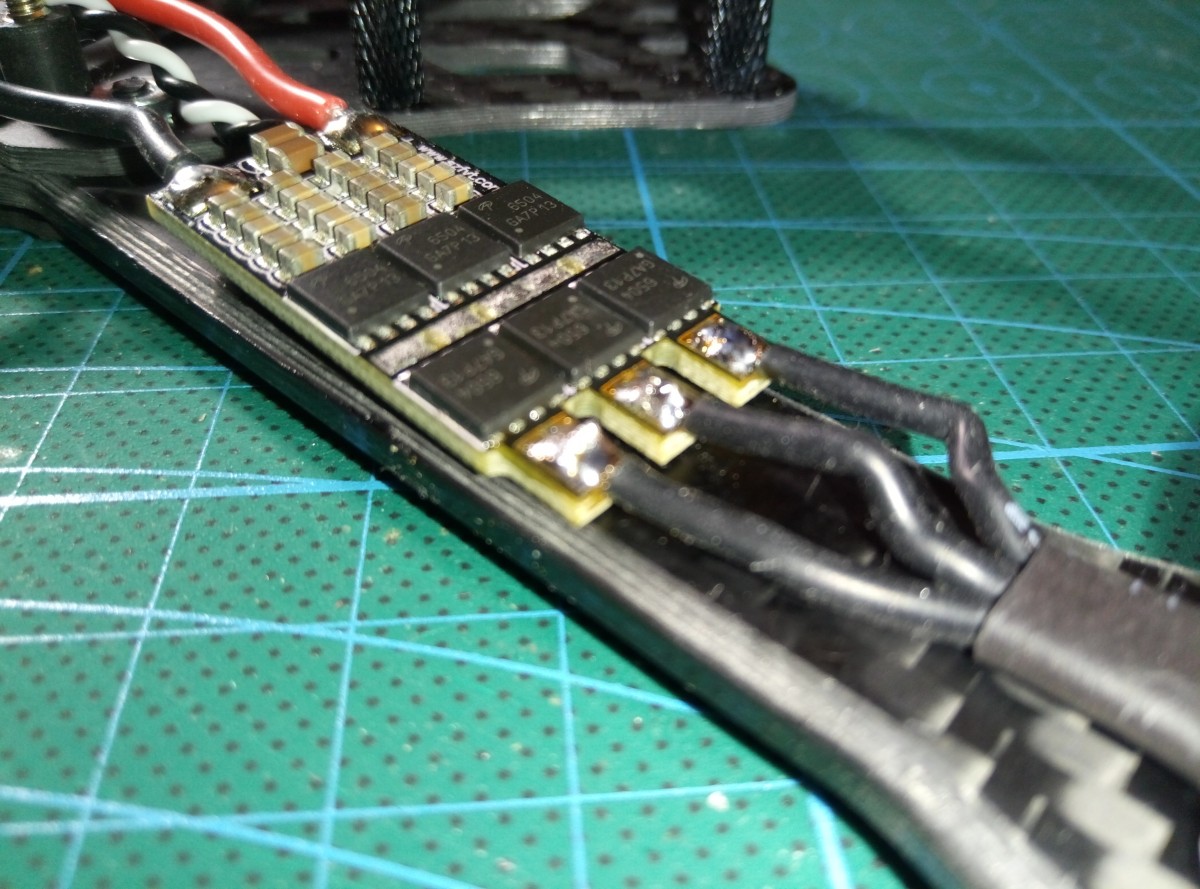
Установка регуляторов
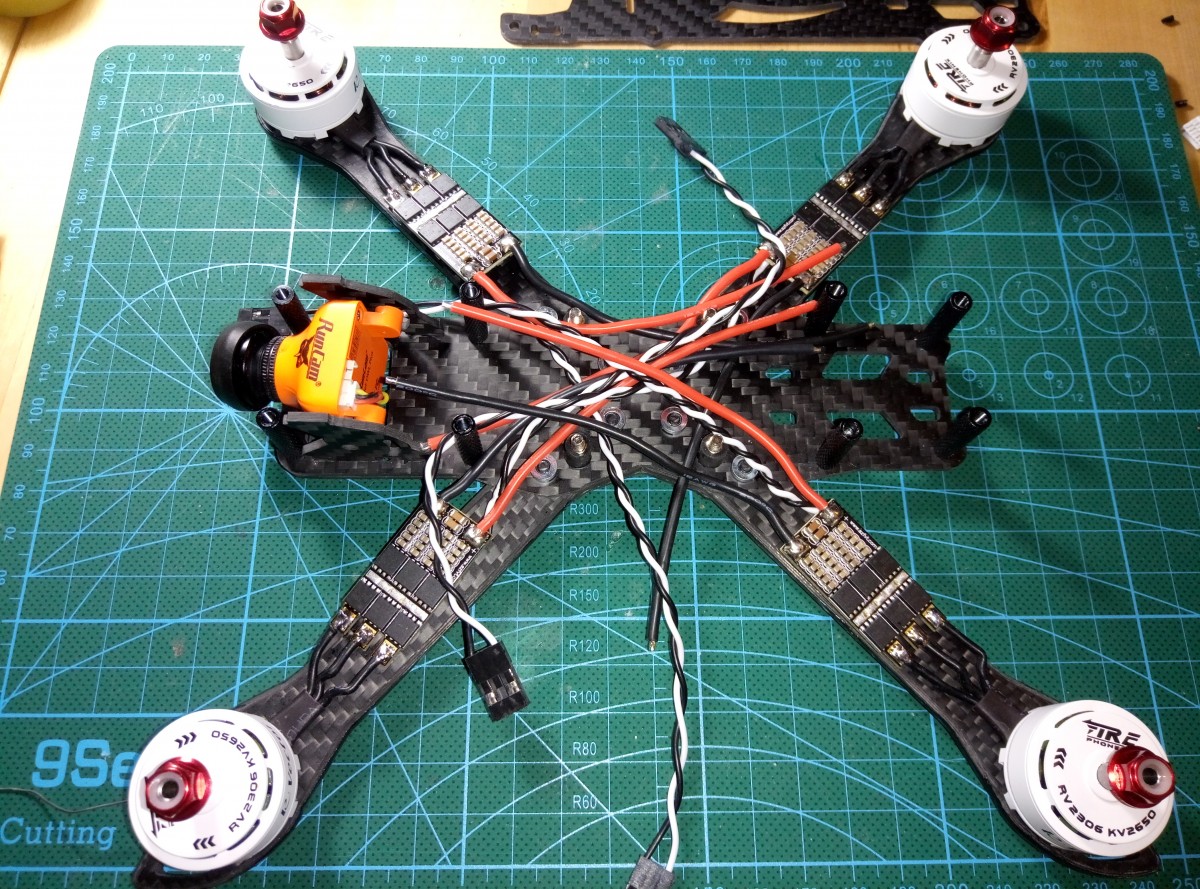
Примеряю размещение видео передатчика. Места за камерой достаточно ( это не Thor). А вот сзади Tramp не удобно размещать.
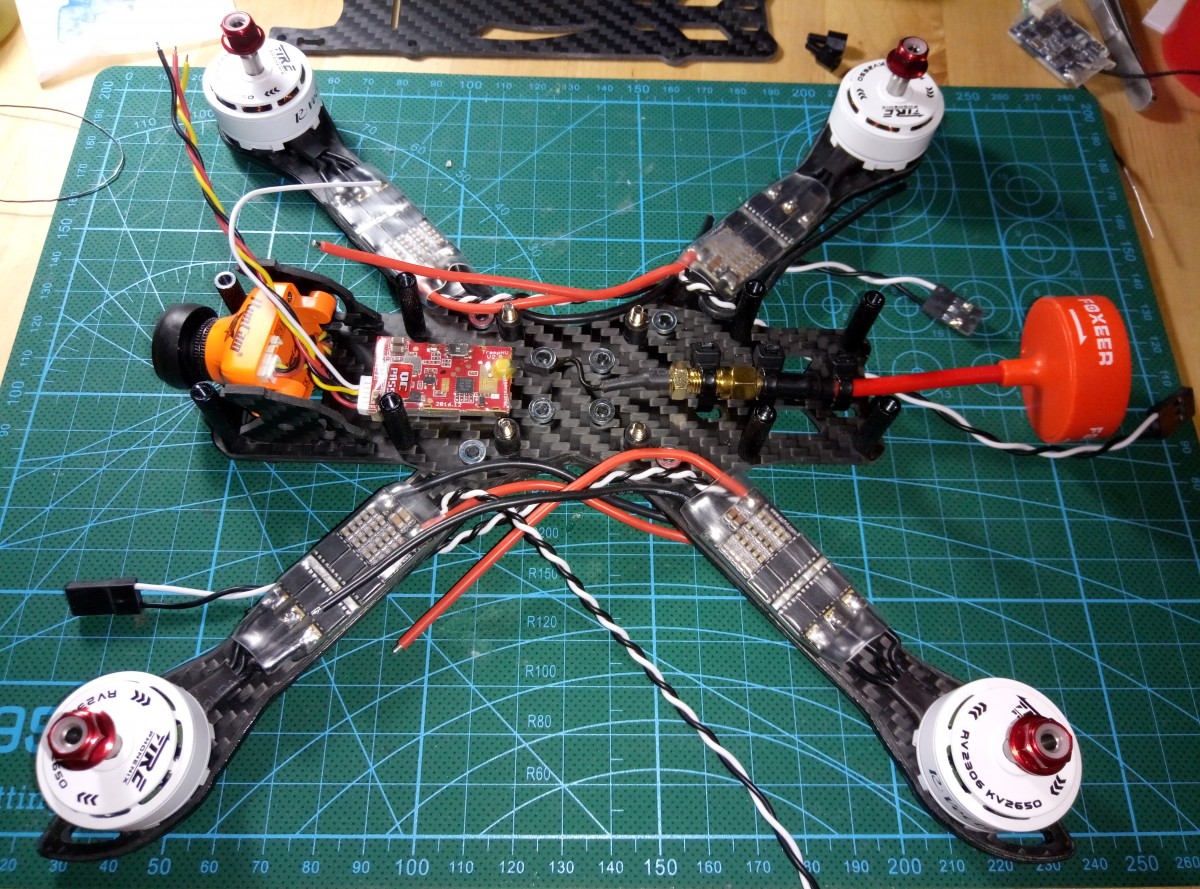
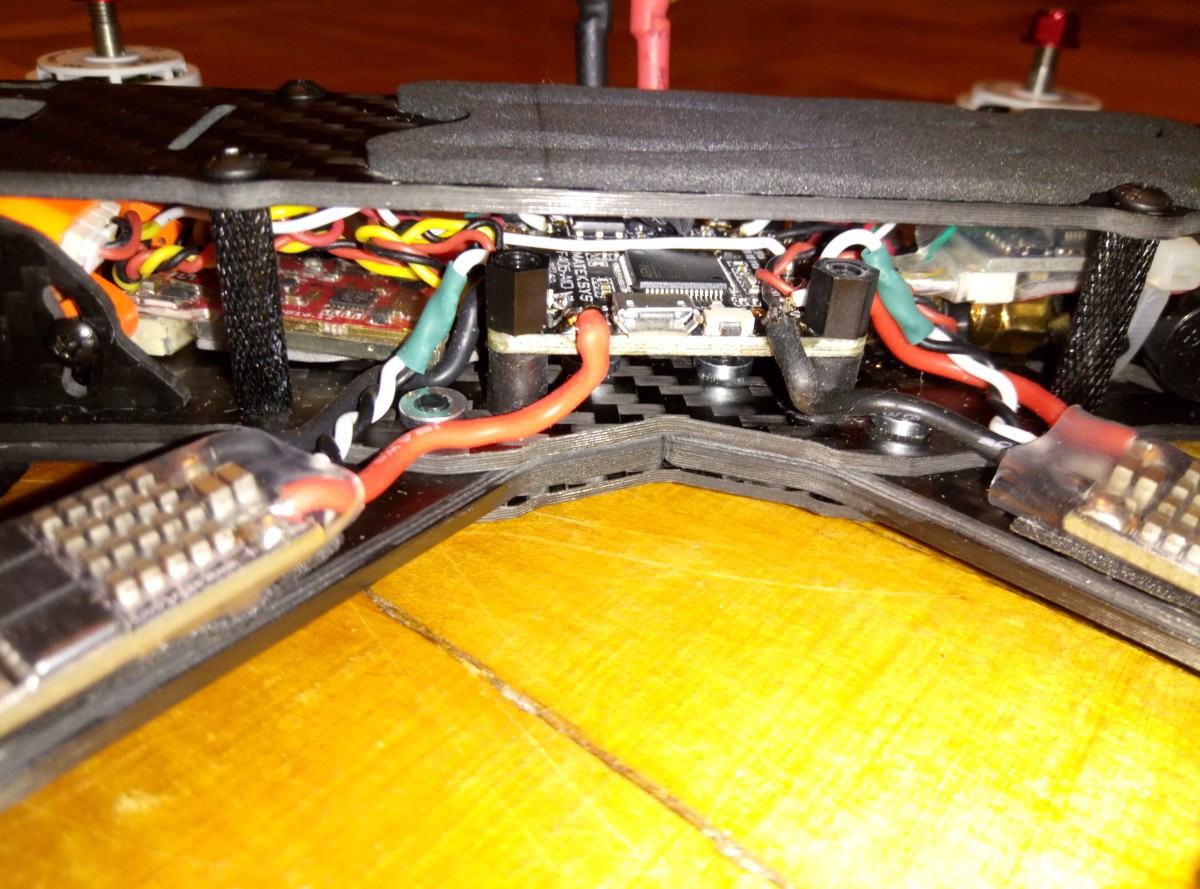
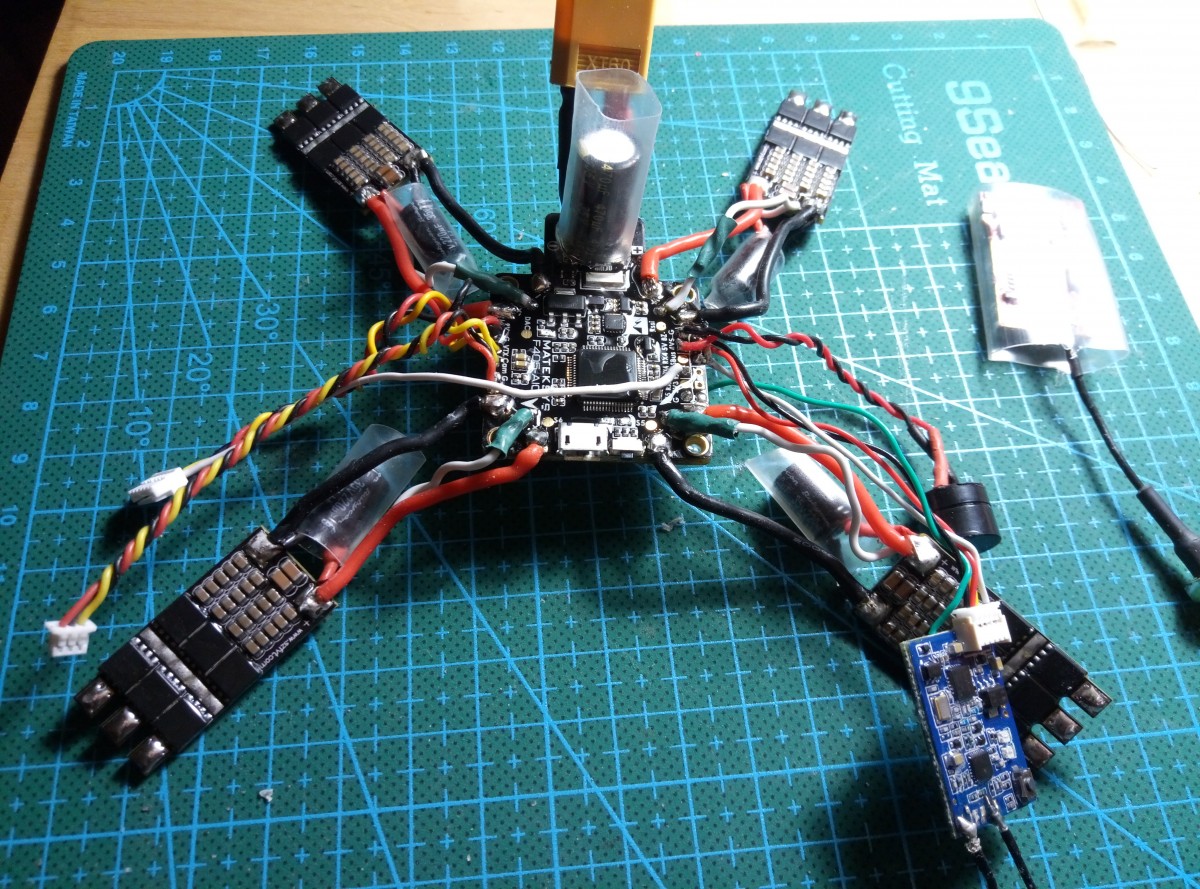
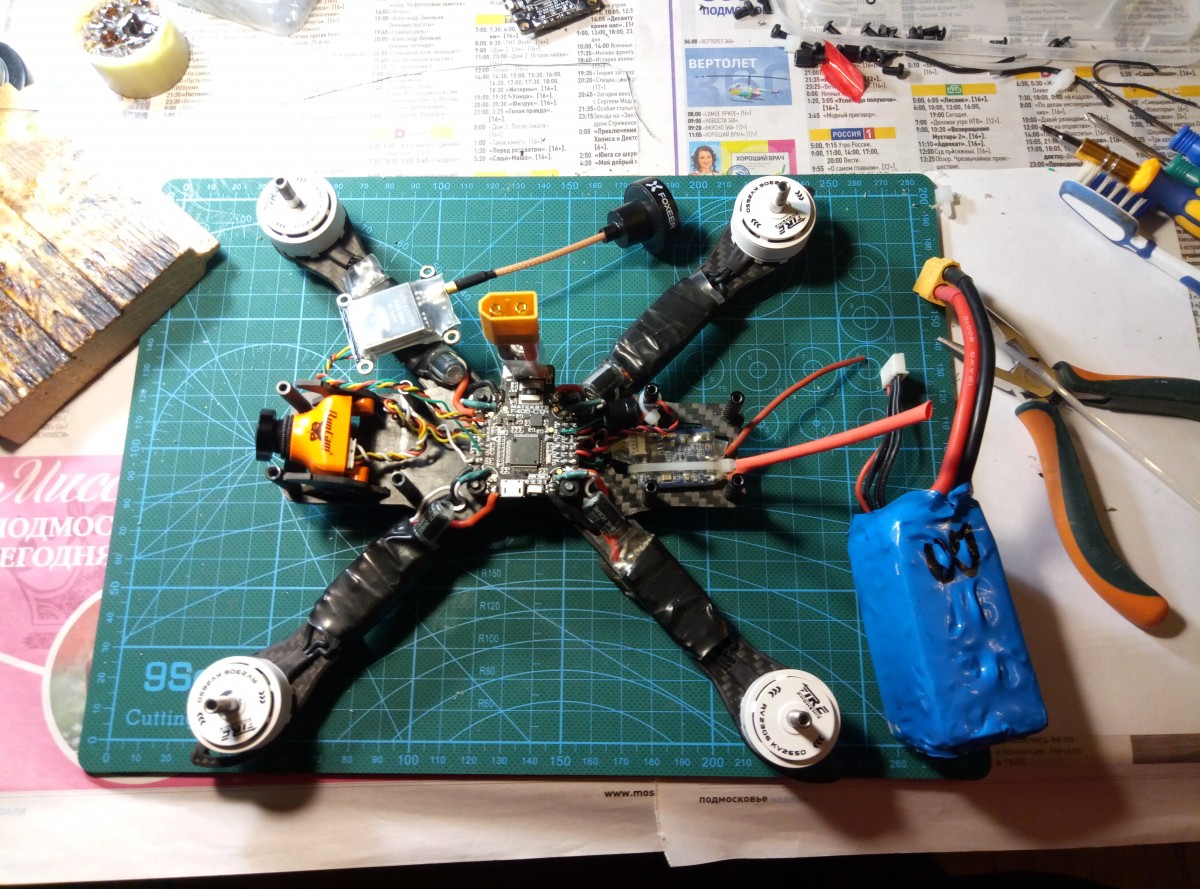
Устанавливаю полетный контроллер и подключаю все остальные компоненты. Приемник можно разместить на верхней панели, но я не хочу на нее ничего крепить, т.к. к ней будет крепиться батарея и возможен шанс, что ее вырвет,
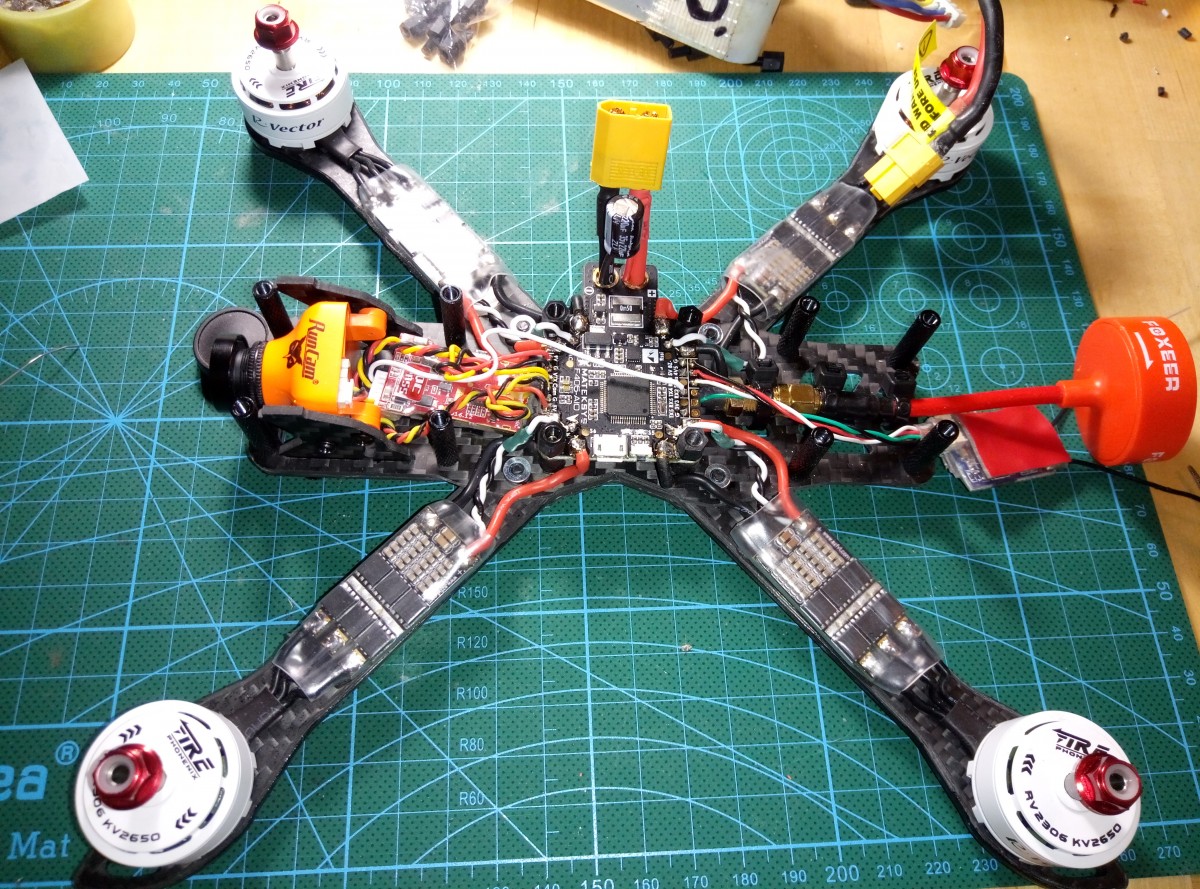
Проверяю цепи питания и первое включение. все работает.
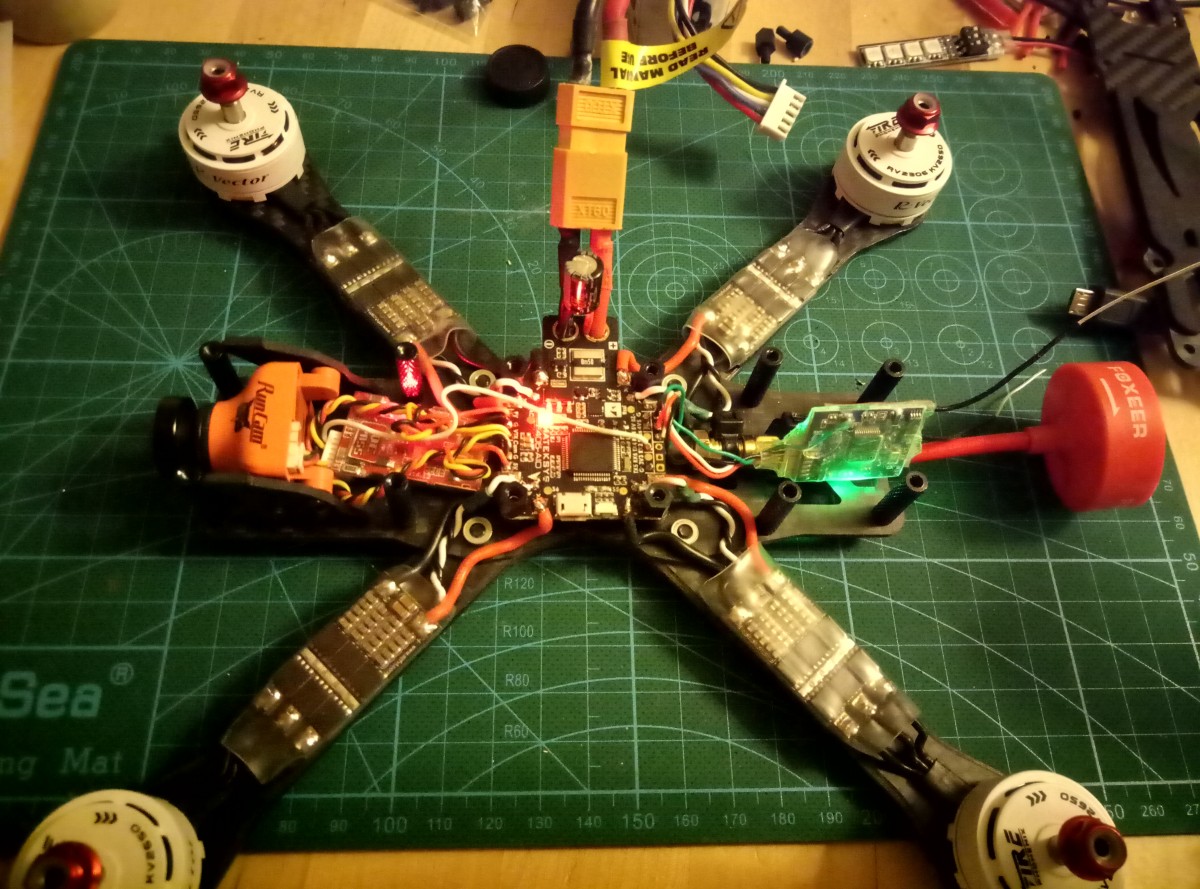
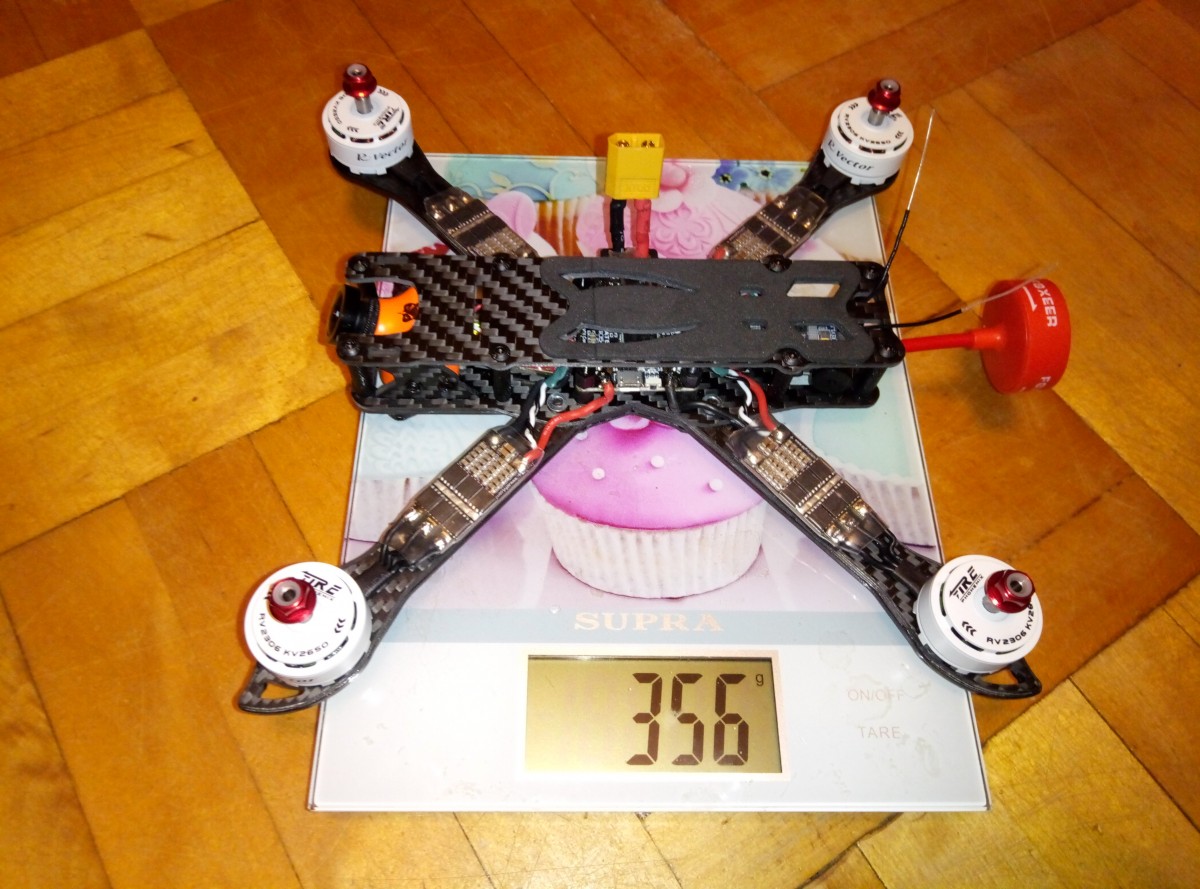
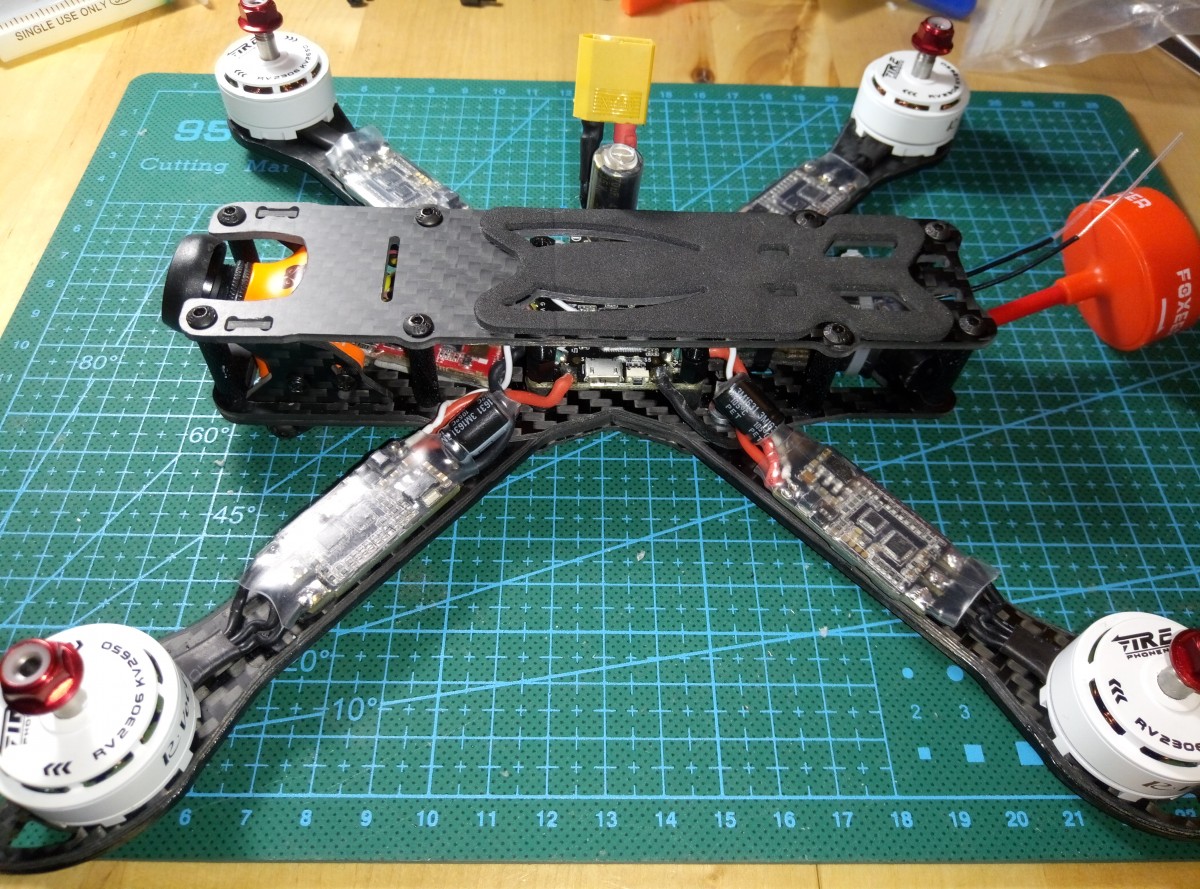
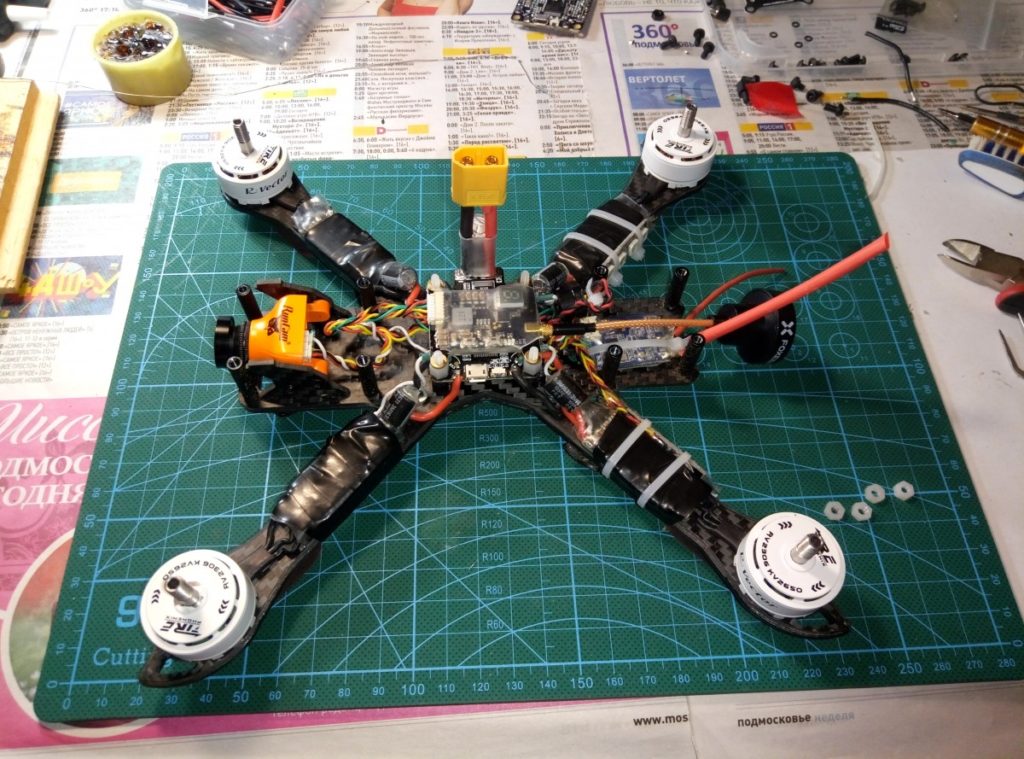
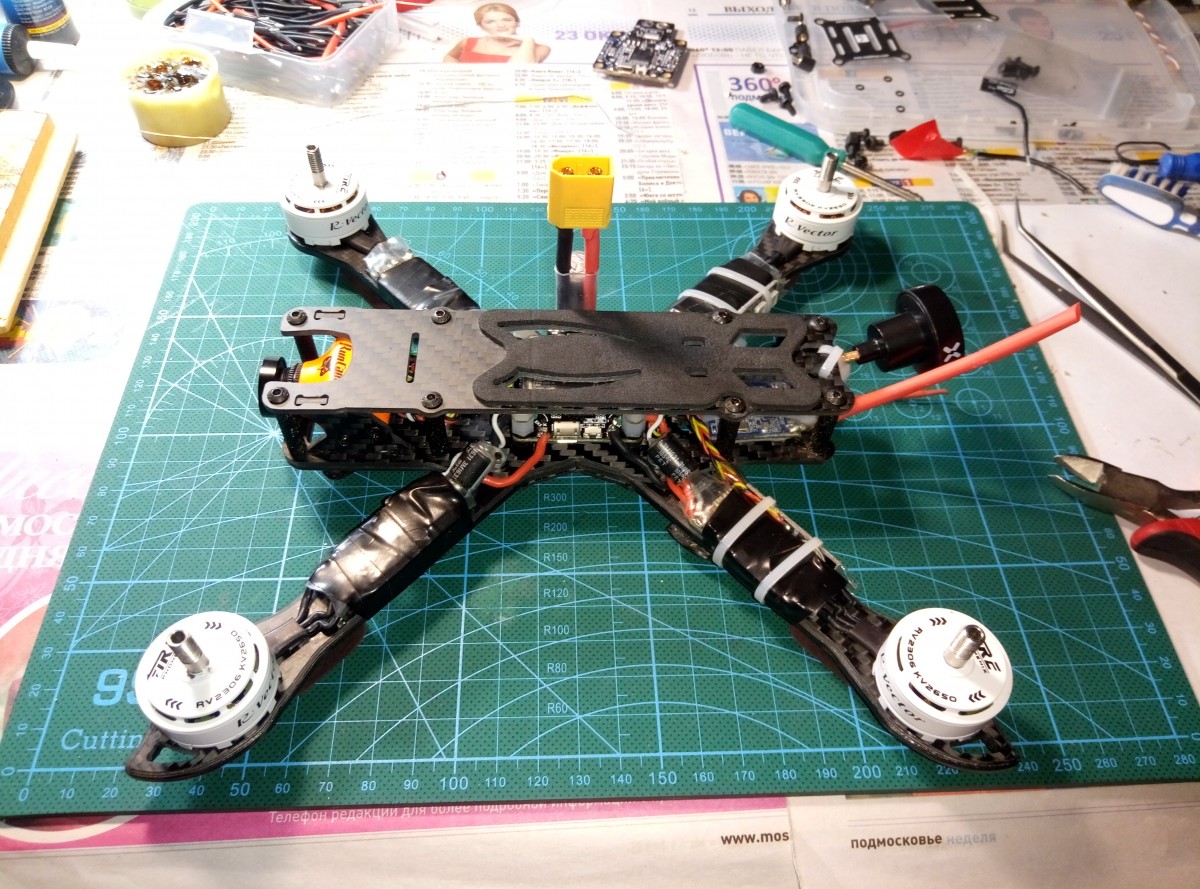
Скручиваю и вот что получилось.

Небольшие проблемы возникли после сборки- видео изображение с шумами, пришлось разобрать и под разъем антенны подложить изолирующую прокладку. Заодно фото сессия с другими квадрами. С Thor 210


c DALRC XR220 и Rocket 200. Оба стали донорами, один отдал VTX другой TX

Вместе с рамой был подарок- пропеллеры GemFan 5152. Очень красивый цвет.

Наиболее частые пропеллеры у фристайлеров HQPROP V1S 5 x 4.3 x 3. Буду пробовать.

Настройка.
Обновил прошивку на ESC до версии 16.7
Установил Betaflight 3.2.2.
Выставил DSHOT600 и обновление Gyro и Looptme 8/8. Поменял направление вращения пропеллеров.
set small_angle=180
set sdcard_dma = off
set debug_mode = NOTCH.
Пока по рейтам буду пробовать свои подбирать. В сети нашел рейты известных фристайлеров
| JohnnyFPV | MR Steel 2016 | MR Steel 2017 | Kebab | |
| Roll | 1.29 — 0.75 — 0.21 | 1.75 — 0.7 — 0.22 | 1.92 — 0.68 — 0.22 | 1.02 — 0.74 — 0 |
| Pitch | 1.26 — 0.74 — 0.2 | 1.75 — 0.7 — 0.22 | 1.92 — 0.68 — 0.22 | 1.02 — 0.74 — 0 |
| Yaw | 1.08 — 0.67 — 0.07 | 1.5 — 0.65 — 0.1 | 1.92 — 0.59 — 0.12 | 2.05 — 0.45 — 0 |
| Set point | 1 | |||
| 0.25 |
Облет
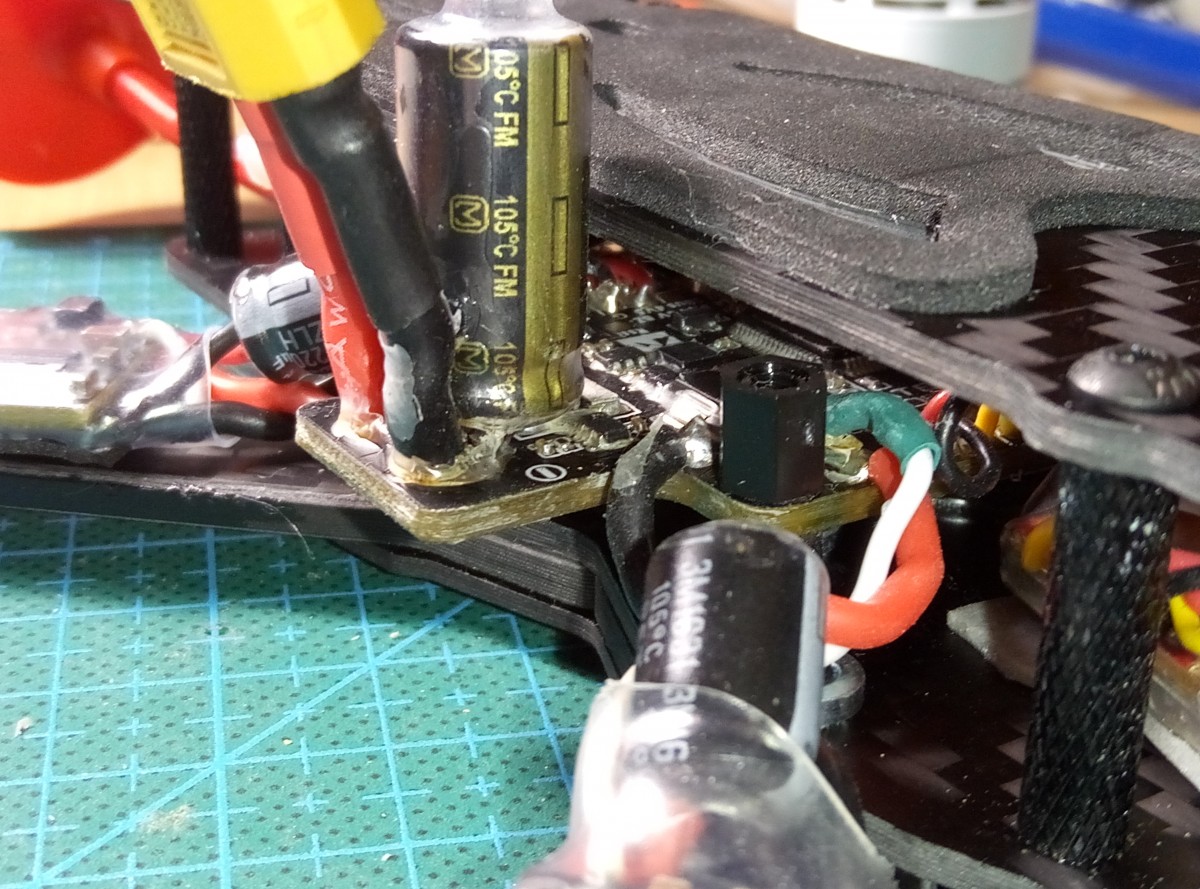
Первое же включение и проверка без пропеллеров выявила глюки в полетном контроллере, оказалось это для него типично. По оси YAW дрон начинает подергиваться. Если на 8/8 и меньше это происходит время от времени, то при выставлении часто 32 и 16 у Гиры дрон входи в резонанс сразу же после включения моторов. Поиск по сети не дает однозначного решения, где то помогают конденсаторы, что я и сделал установив 3 из 4-х. А где то это не лечится и следует менять FC.
Пример и объяснение проблемы
Доработка.
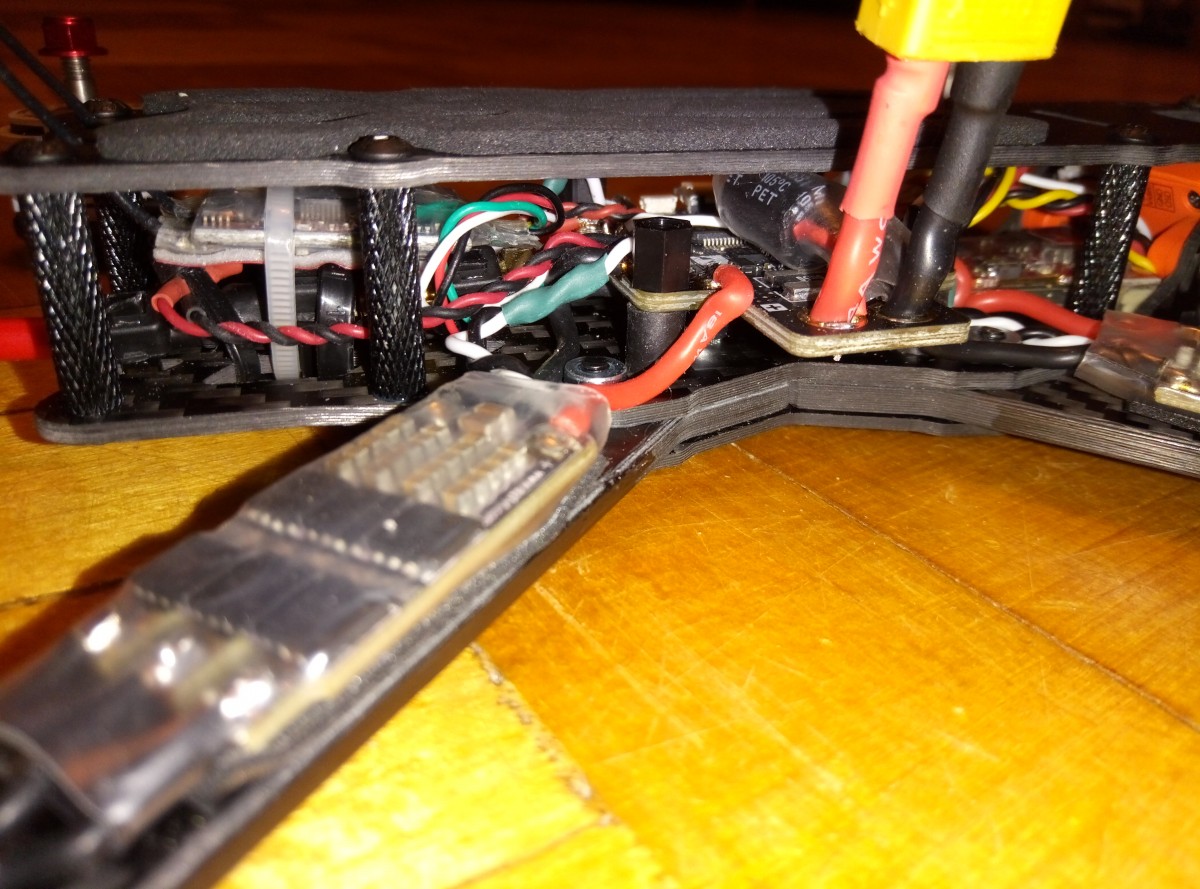
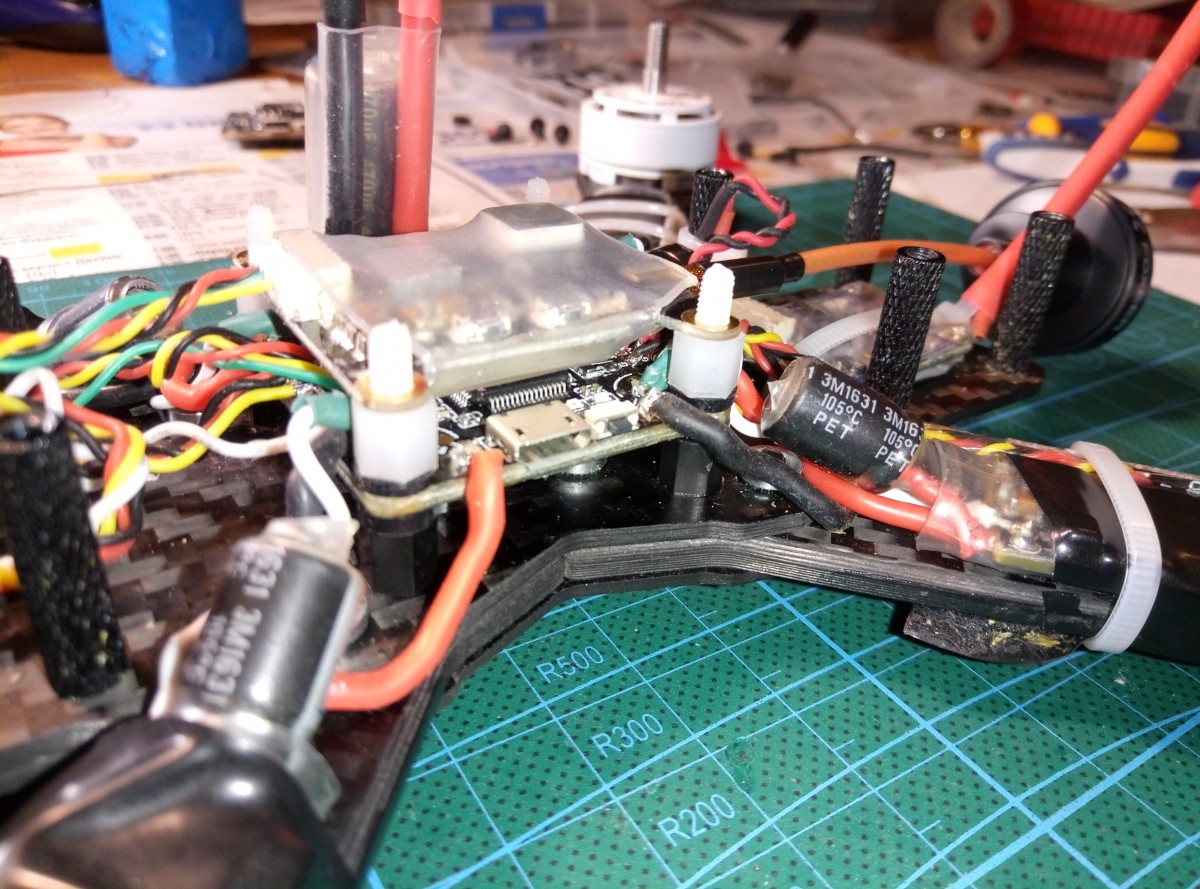
Обработка деталей PlastiDip. Установка на FC конденсатора 470 mF
Добавление на ESC конденсаторов из комплекта к FC 220 mF
Сборка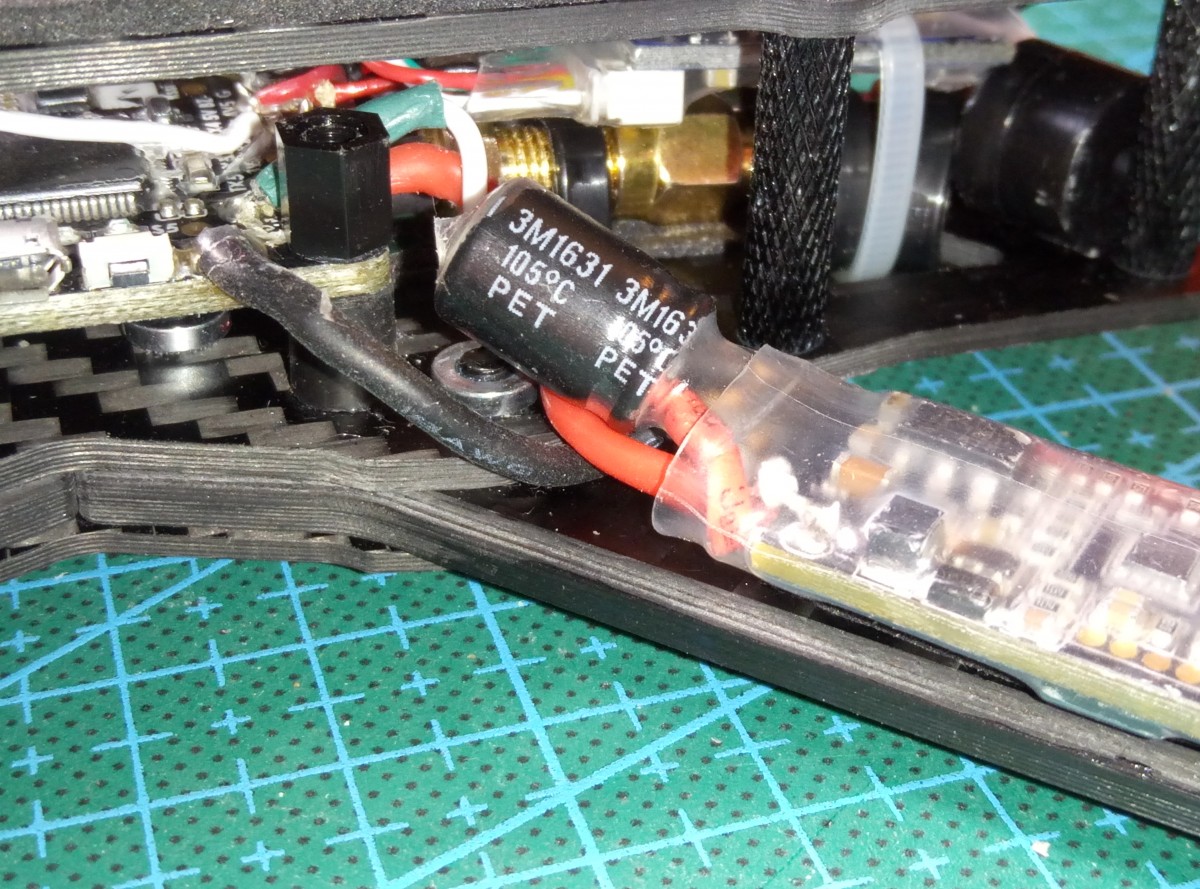

К сожалению облет пока не дал полного решения проблемы, стало лучше, но проблема не ушла.
Также опубликовал свою сборку на ресурсе RotorBuilds![]()
https://rotorbuilds.com/build/8736
UPD: Заменил полетный контролер на Matek F405 CTR. Заодно поменял видеопередатчик EWRF и поставил антенну Pagoda
Облетал успешно
UPD:- новая переборка пол LR